


2021年9月晚些时候珠海航展期间,中国兵器工业集团有限公司推出1款VU-T10履带式地面无人作战平台。这款自重接近12吨的履带式无人装甲车辆,一个大型的双向稳定的上装集成1种较大口径高平两用速射炮、1种较小口径并列机枪、2套光学、夜视和热成像观瞄系统、2组反装甲导弹;载具方面则采用前横置柴油机串联1组基于扁线绕组技术ISG发电机组成的油电混合增程式动力系统、在后部设定2组驱动电机、在车身中部布设1以冷却液为介质主动散热功能的热管理控制技术(策略)的锂电池系统。
备注:VU-T10履带式地面无人作战平台的技术状态以官方发布的信息为准。
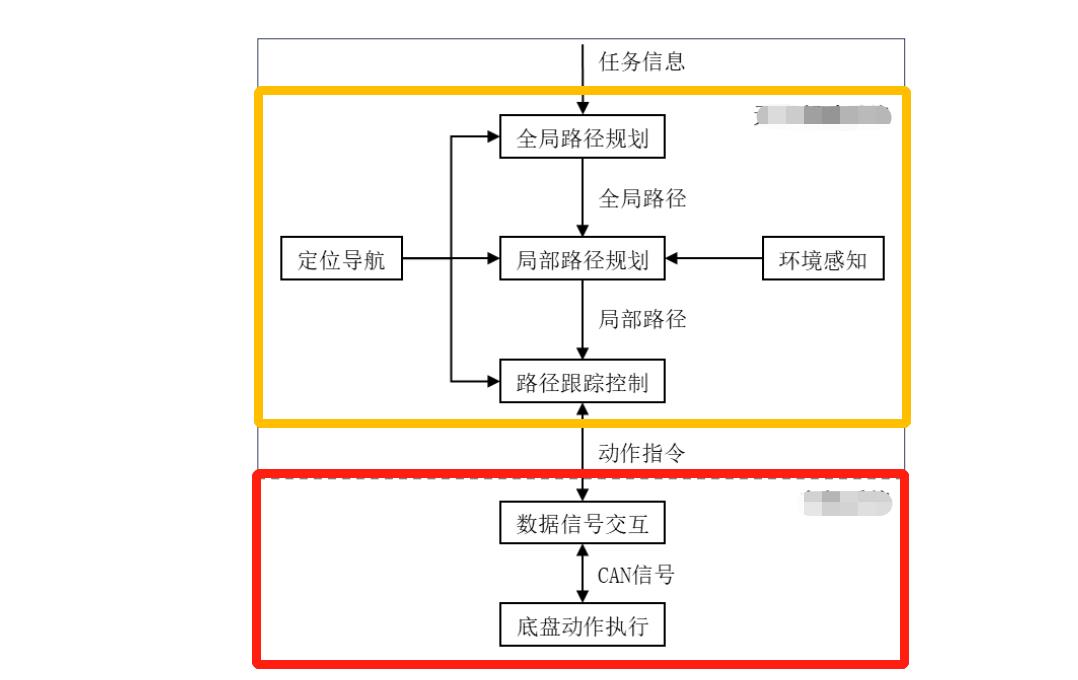
黄色区域:环境感知模块
红色区域:线性底盘模块
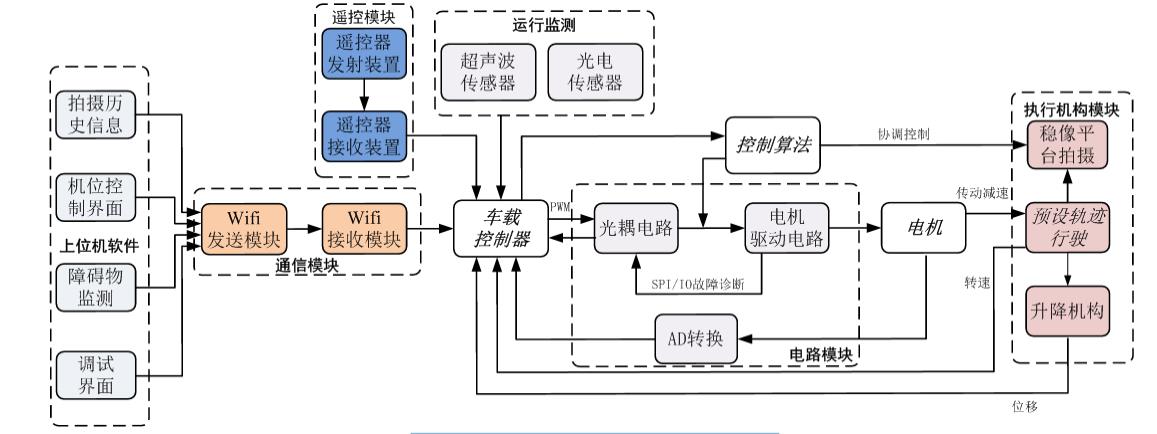
作为履带式无人驾驶/操控装甲作战装备,VU-T10的上装为作战模块;载具采用全电驱动的线控底盘技术,配置了以激光雷达为核心、毫米波雷达和光学摄像器材(包括热成像系统)为辅的环境感知系统。VU-T10履带式无人装甲车在“满油满电”状态 大续航里程超200公里,具备以低噪音和低辐射状态隐蔽侦查与搜索,进行动对动+动对静单兵或群体快速打击的技战术状态。
需要注意的是(1),无论上装作战模块和环境感知模块,还是载具的电传动系统,都属于耗电单位并对整车的发电效率要求较高。
需要注意的是(2),VU-T10履带式无人装甲车辆油电混动增程系统中的ISG发电机的综合性能,与动力电池系统能量密度,成为决定整车技战术状态的关键点。

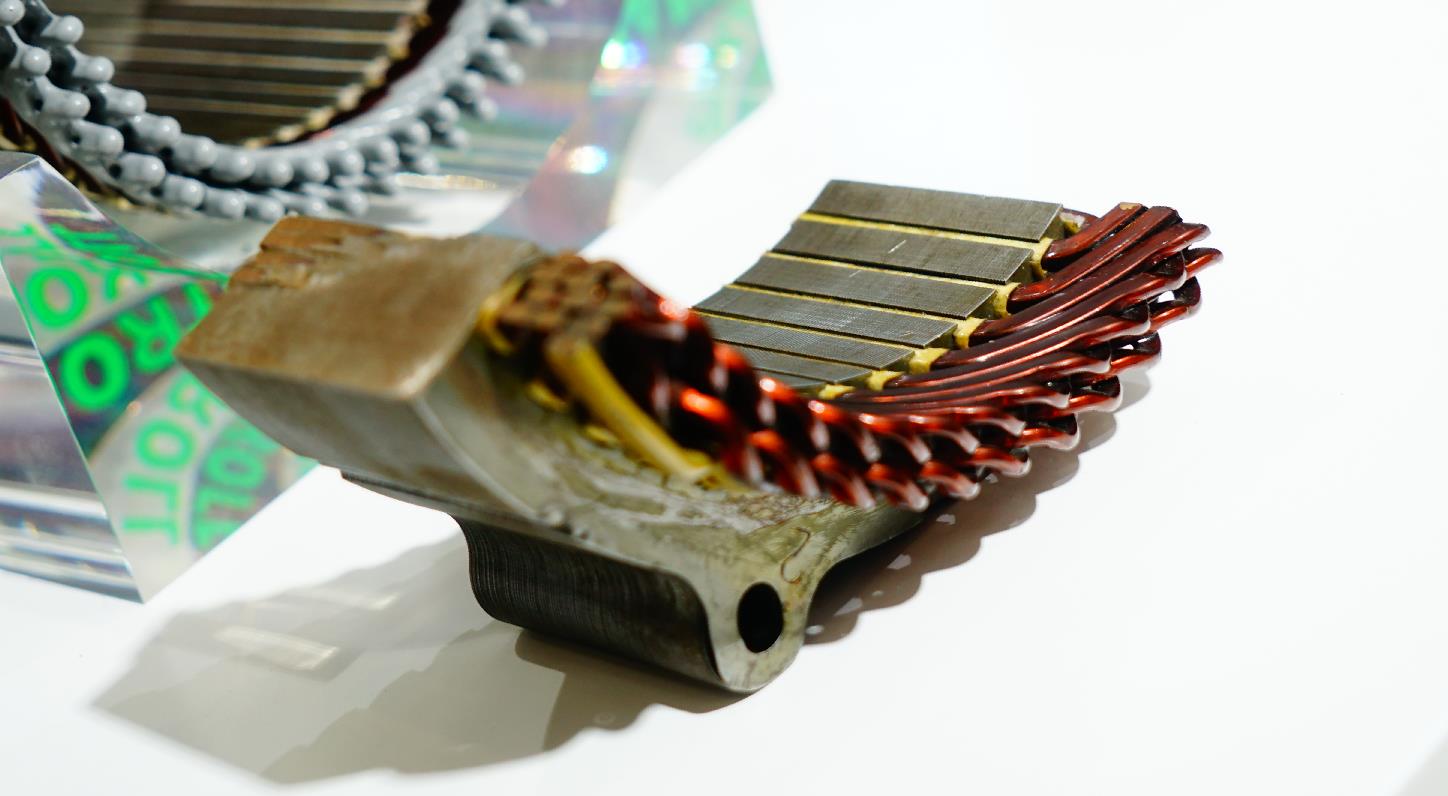
在此次珠海航展中,只有一家松正电机参展商战术了“1槽4线”、“1槽6线”、“1槽8线”、性能极其出众的“1槽10线”的扁线电驱动系统以及配套的电控单元。
红色箭头:“1槽10线”ISG发电机
黄色箭头:“1槽6线”ISG发电机
蓝色箭头:“1槽4线”驱动电机
绿色箭头:“1槽8线”驱动电机
黑色箭头:特殊定制扁线驱动电机
需要注意的是(3),在 近几年美军、日军、德国以及英军都在新能源技术军用化方面持续投入。为了提升电驱动系统效率,基于扁线绕组技术的驱动电机和ISG发电机得到优先发展。
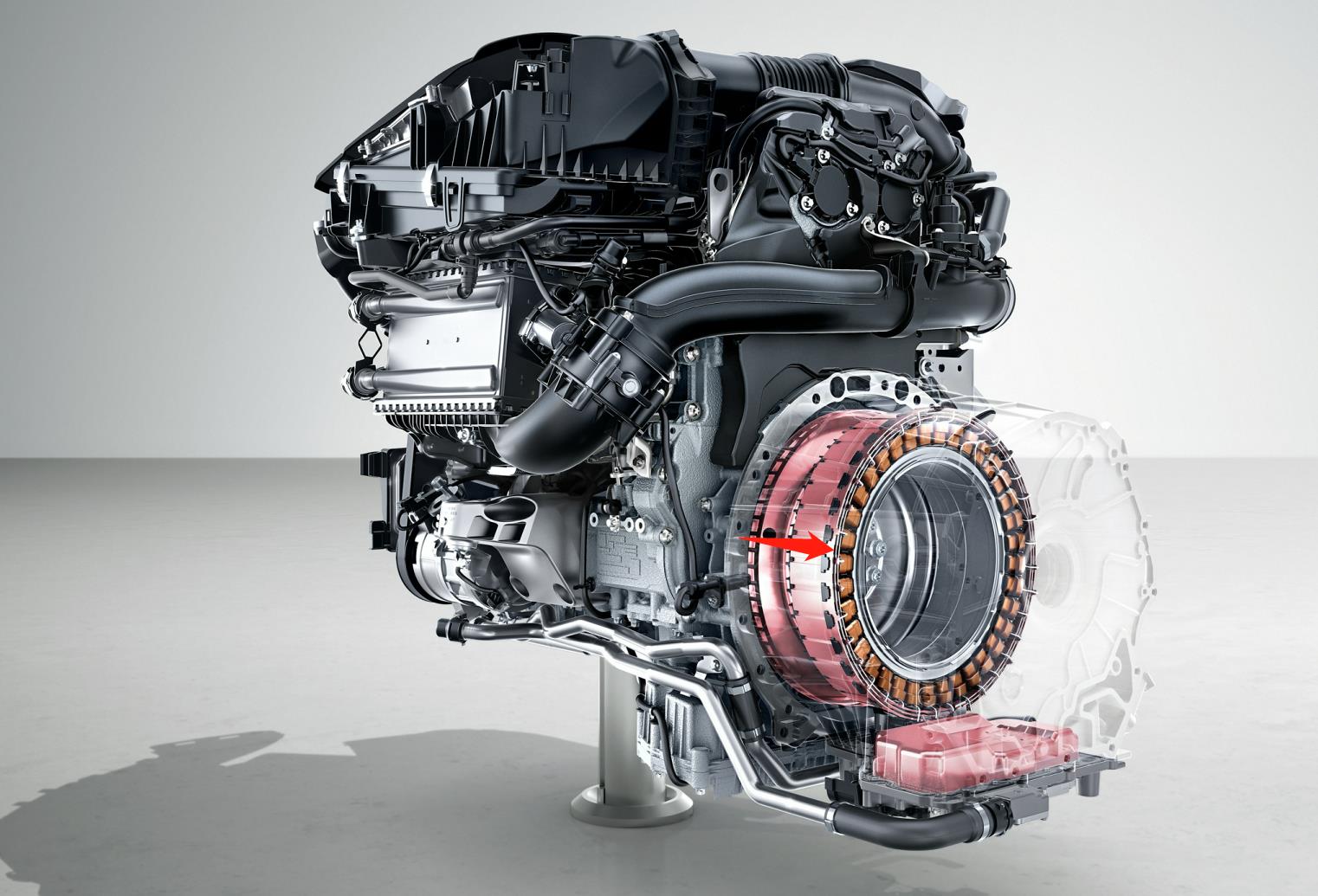
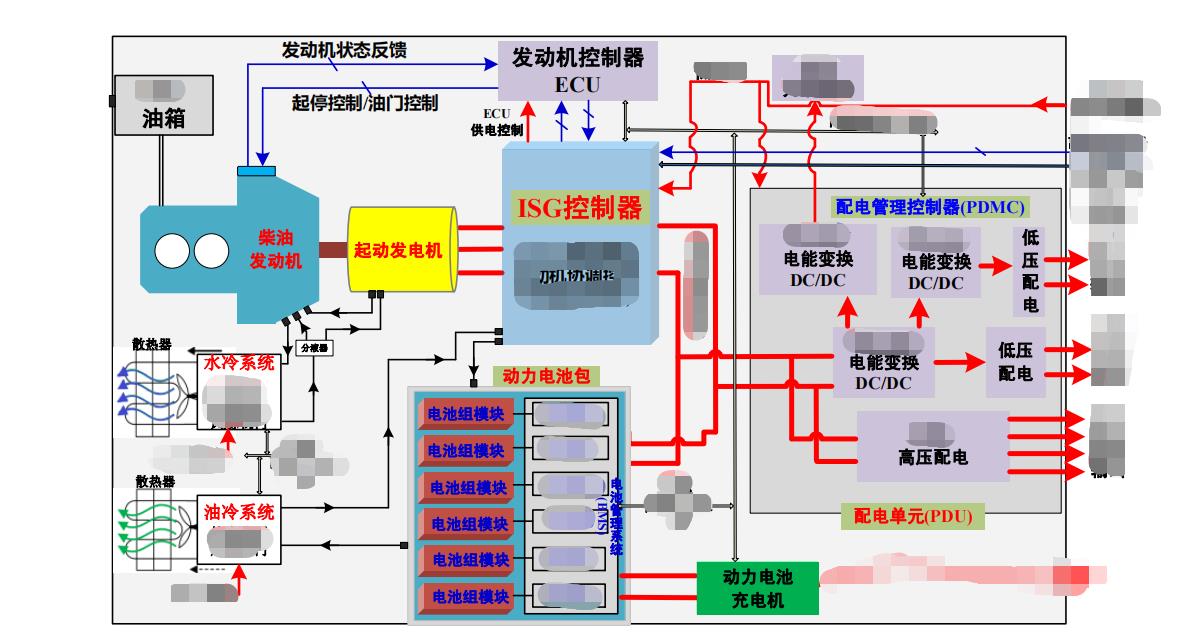
上图为某款民用车适配的直列四缸汽油发动机,串联的1组基于扁线立绕技术的ISG启发电一体机的结构简图。
VU-T10履带式无人装甲车辆的油电混动系统,适配扁线立绕或发卡绕组技术ISG发电机,可有效缩短横向长度(红色箭头所指)。在预先设定的动力舱内将更多的空间,“让”给更大排量发动机以提高发电功率,用于多种不同用电单位的作战需求。
ISG启发电一体机(后文简称ISG发电机):盘式一体化起动机/发电机直接安装在发动机曲轴输出端,取代啮合在飞轮的传动低压起动机和发电机,即可用于驱动也可以用于发电。采用扁线绕组技术的ISG启发电一体机可以效缩短长度,或通过降低自重小型化(容纳在更狭小空间)、或通过增加功率(提高发电效率),满足车辆或装备用电需求。
新能源情报分析网将对VU-T10履带式无人装甲车辆技战术战术研读,并着重就增程式混动系统的ISG发电机技术判定。
1、VU-T10履带式无人装甲车的战术打击效能(上装作战模块):

上图为VU-T10履带式无人装甲车无人操控的炮塔技术状态细节特写。
白色箭头:20+mm口径的高平两用速射炮
红色箭头:与速射炮并列设定的12.7mm口径(疑似)的机枪
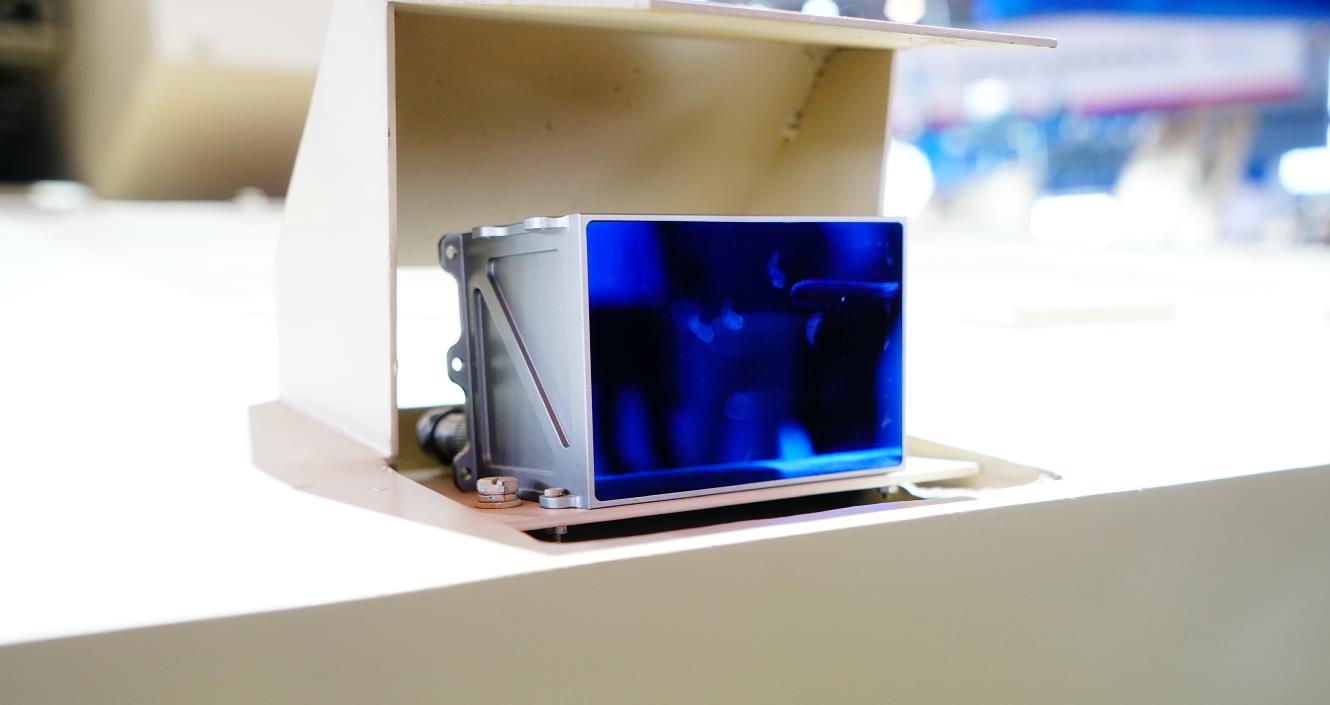
黄色箭头:高低错落设定2组由白光、夜视和热成像构成的三通道观瞄系统
绿色箭头:围绕炮塔两侧设定的2x3组烟雾发射器
蓝色箭头:炮塔左侧(面对VU-T10履带式无人装甲车)设定2组反坦克导弹(或具备打击低空武装直升机和摧毁地面工事)
需要注意的是(4),VU-T10履带式无人装甲车无人炮塔设定2组功能几乎完全一致的双向稳定三通道观瞄系统,或分别伺服机炮(机枪)和多功能反装甲导弹系统;或用于实战环境穿透雾气识别复杂路况的环境感知,与线控底盘联动的激光雷达\毫米波雷达\视频系统联动。

采用无人操控的上装作战模块(炮塔),通过螺栓在正面、正面、侧面、后面以及顶部固定了装甲板(蓝色箭头所指),并为反装甲导弹侧向设定了保护措施。
需要注意的是(5),机炮炮管四周安装了矩形(截面)防护套(提高散热效率),并“预留”了并列机枪枪管(红色箭头所指)的凹槽(黄色箭头所指)。
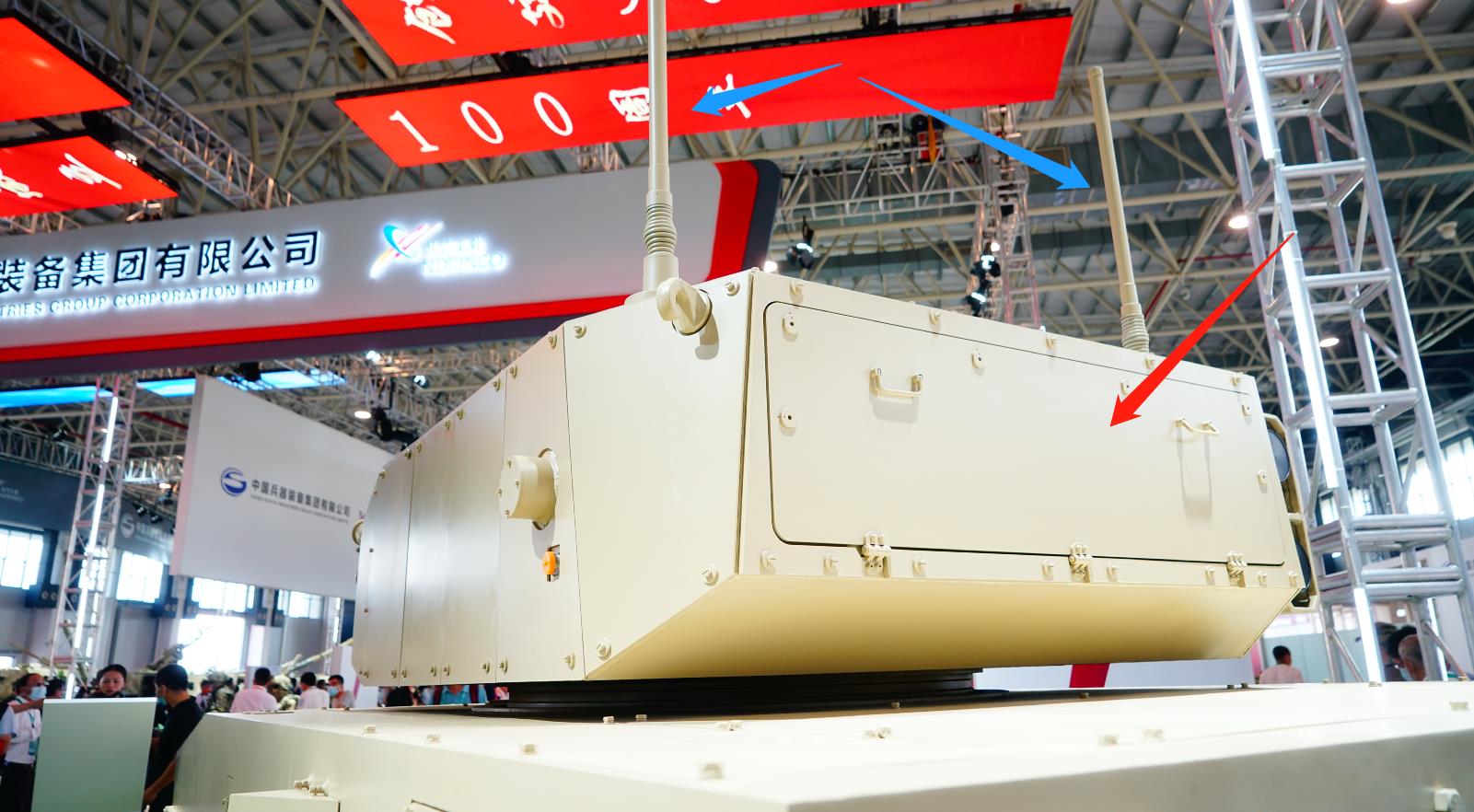
在无人操控炮塔的顶部(靠后)设定2组鞭状天线(蓝色箭头所指),用于远程通信以及在预设距离内人员对VU-T10履带式无人装甲车进行遥控。在无人操控炮塔的后部舱室为容纳两种口径的弹药、火炮和机枪自动输弹系统以及相关电液伺服机构。
需要注意的是(6),传统坦克的炮塔尺寸较大通常使用两级液压机构机用于大速率和高精度旋转;双向稳定的火炮伺服机构采用电液一体化系统。对于VU-T10履带式无人装甲车的上装作战模块,肯定会设定电液一体化伺服机构,但是诸多观瞄系统以及控制系统的采用高电压平台的电动化伺服系统。
2、VU-T10履带式无人装甲车的激光雷达无人驾驶技术状态(环境感知模块):

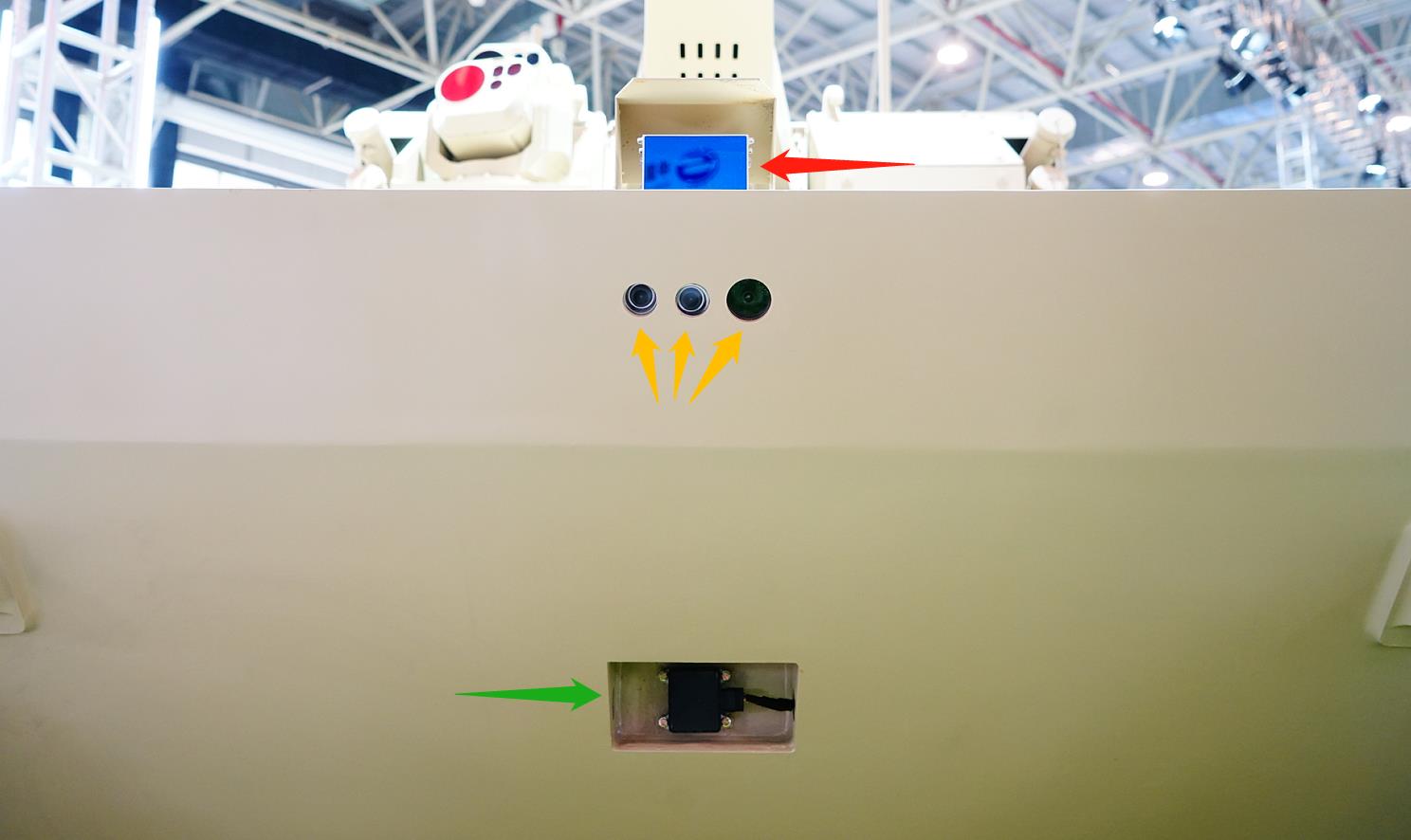
在VU-T10履带式无人装甲车前首上装甲设定了1组扫描范围270度、40线的固态激光雷达;在首前装甲设定了2组白光摄像头和1组热成像视频系统;在首下装甲设定乐1组毫米波雷达;在车身两侧后部的装甲设定各设定1组白光摄像头;在尾部装甲设定了1组白光摄像头。
有些奇怪的是,这台用于展示的VU-T10履带式无人装甲车没有加装北斗2代导航系统的外置天线。
VU-T10履带式无人装甲车上集成的军用无人驾驶技术解决方案,绝不等同当下基于白光摄像头+高算力芯片+毫米波雷达构成的民用无人驾驶系统。VU-T10履带式无人装甲车具备在实战环境下自主无人驾驶、侦查、搜索和打击的战术效能。
红色箭头:激光雷达
黄色箭头:摄像头组件
绿色箭头:毫米波雷达

上图为用全彩夜视仪,在夜间拍摄的纳瓦拉四驱皮卡静态特写。

在解放军 新的通用轮式载具标配热成像仪,明显提升了驾驶员夜间行车安全和隐蔽性(浙江大立为全新一代猛士车族全系车型提供的2代热成像视频采集系统)。
载具方面的无人驾驶系统以40线(疑似)激光雷达为核心,快速掌握正前方270度扇形范围内的静态和动态人员和物体方位,毫米波雷达配合激光雷达机型多重定位和校准,远视场\近视场白光摄像头进行时视觉判断,在暗夜环境下则被热成像摄像器材替代。
换句话说,具备自动驾驶和远程遥控的VU-T10履带式无人装甲车,在气候复杂没有分道线的实战环境耗电量将大幅增加。而增程混动技术方案,将为VU-T10履带式无人装甲车提供充沛的电量支持。
在民用无人驾驶技术解决方案中,毫米波雷达+光学视频系统的组合 为常见,成本也 低, 容易与整车实现量产。然而,在没有激光雷达的探测下,在白天可以通过毫米波雷达和白光摄像头进行环境感知;在黑夜白光摄像头工作效率被大幅压缩,更主要的感知设备依赖毫米波雷达。
需要注意的是(7), 近几年多款以毫米波雷达+白光摄像头为环境感知系统的民用电动和增程混动车,频繁太多在白天开启“自动驾驶”系统后,没有及时识别前方“障碍物”后发生追尾事故的案例。

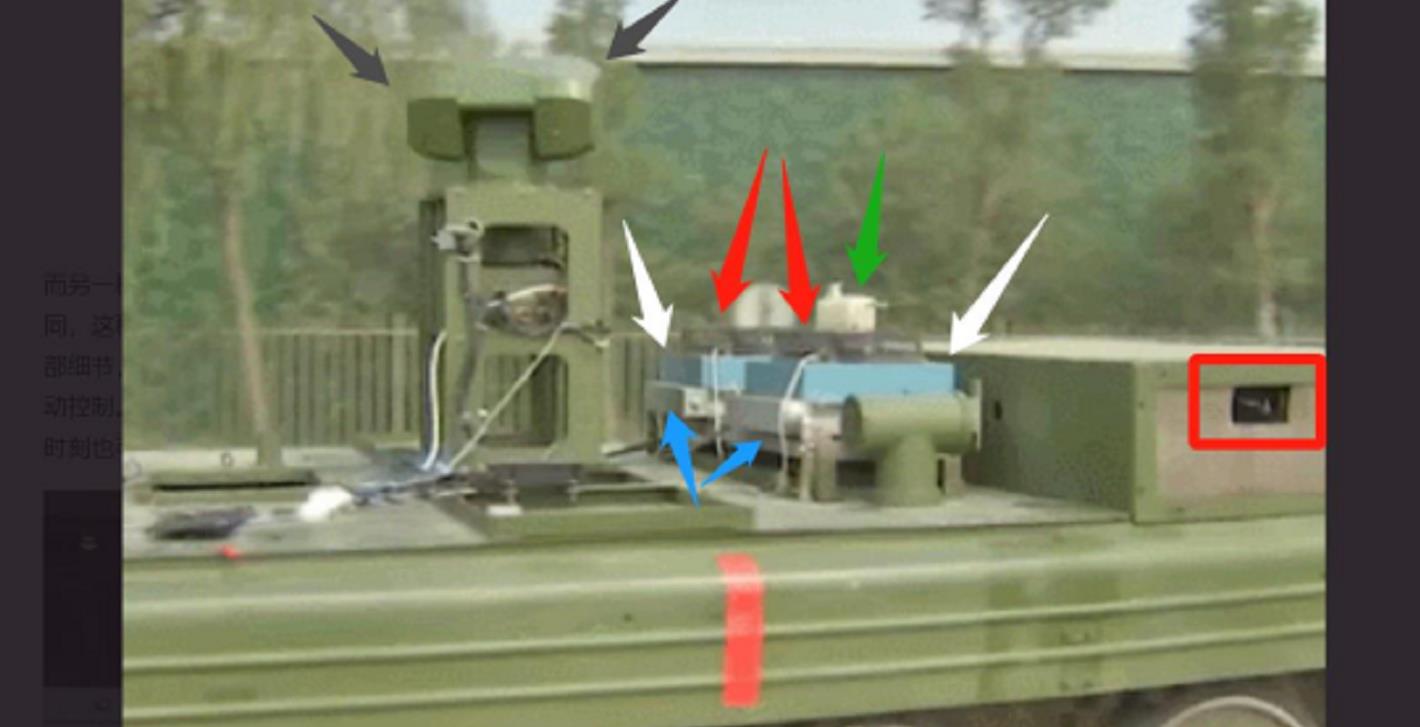
需要注意的是(8),由北京理工大学研发的63式增程混动无人驾驶装甲技术验证车,不仅配置了3组激光雷达(白色箭头所指),3组白光摄像头(蓝色箭头所指),2组毫米波雷达(黄色箭头所指,前后装甲各设定1组),以及1组定制双向稳定热成像+夜视观瞄基站。

上图为63式增程混动无人驾驶装甲技术验证车进行S型无人驾驶机动时,观瞄基站呈俯视状态(纵向,黄色箭头所指)且45度角(横向、红色箭头所指),疑似对砂石路面进行环境监测,以补充固定在车身正向与侧向的激光雷达和视频系统存在视场误差。
3组激光雷达、2组毫米波雷达以及3组白光摄像头构成了完整的全车360度环境感知方案,而顶置双向稳定热成像+夜视观瞄系统在完成实战环境下的侦查和搜索战术需求同时,还有效提升了整车无人驾驶性能精度。
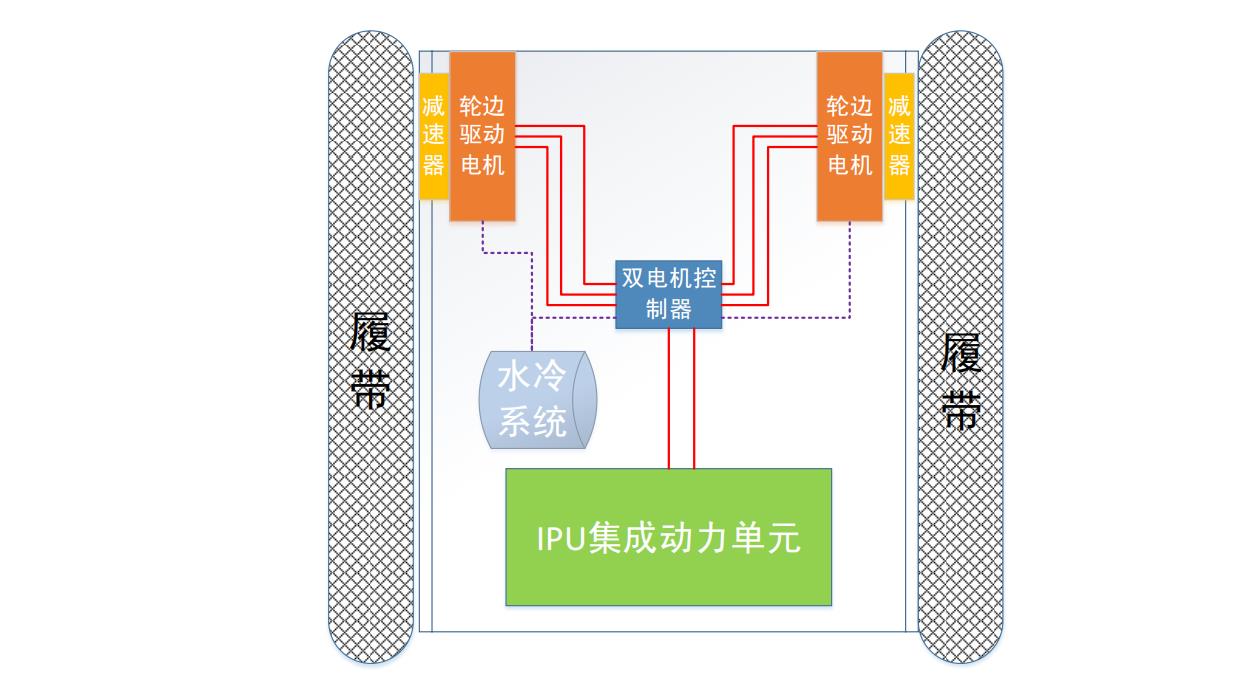
3、VU-T10履带式无人装甲车油电混合驱动技术状态(线控底盘驱动模块):

VU-T10履带式无人装甲车采用增程式油电混合技术,为与首上装甲下端横置柴油机(红色箭头所指)+扁线绕组ISG发电机(蓝色箭头所指)、后置的主动轮为驱动电机关联(黄色箭头所指)、车身中部设定1组三元锂或磷酸铁锂动力电池总成(绿色箭头所指),“满油满电”状态 大续航里程超200公里。
需要注意的是(9),VU-T10履带式无人装甲车与前横置柴油发动机关联,基于扁线绕组技术ISG发电机 大发电功率110千瓦,可以有效满足动对动和动对静状态的查打侦搜技战术需求。
VU-T10履带式无人装甲车适配的增程式混动技术,前横置柴油发动机为扁线绕组ISG发电机提供动力并转化为电量,具备高机动行车、或用于作战模块、或用于行车发电、怠速发电以及效率 高的行车+存储+作战战术打击。
#1,在全负载高机动状态时,动力总成输出的电量和动力电池存储的电量,同时为两组驱动电机提供动力(并联模式);
#2,在半负载机动遂行低负载动对动战术时,动力总成输出的电量部分用于驱动、部分用于作战模块,当发电效率高于用电需求,“富裕”的电量存储至动力电池系统(串联模式);
#3,在低负载怠速机动并遂行高负载动对动战术时,动力总成输出电量部分用于驱动、部分用于作战模块,当发电效率低于用电需求,“缺少”的电量由动力电池系统弥补(串联+并联模式);
#4,在低速巡航并遂行动对动战术时,动力总成输出电量部分用于驱动、部分用于作战模块,部分电量存储至动力电池系统(行车发电模式);
#5,当怠速停车遂行静对动战术时,动力总成输出的电量不再用于驱动、部分电量用于作战模块、“富裕”的电量存储至动力电池系统(怠速发电模式);
#6,当“熄火”停车遂行隐蔽静对动或隐蔽侦搜战术时,作战模块的电量全部由动力电池系统提供(全电模式);

从提升空间利用率层面看,在整车横置柴油发动机和扁线绕组ISG发电机,以及双侧驱动电机和减速器,结构紧凑腾出的中部空间或可以安装更丰富的作战模块、携带更多的弹药,后部空间用于设定更多电量的动力电池系统。
红色箭头:伺服后置驱动电机及减速器的散热系统百叶窗
黄色箭头:后置主动轮带有齿圈保护措施,避免主动齿过量磨损降低橡胶履带“啮合”效率

上图左为诱导轮;上图右为主动轮;全车应用的是外部橡胶内部经过加强的低噪音履带;
低噪音履带对地面和对负重轮都可以起到缓冲冲击力的作用,间接的降低高机动时产生的噪音,提高己方隐蔽战术能力。当然,低噪音橡胶履带的全面应用还可以延缓电传系统的寿命、提高行走机构的大修间隔。
从平衡整车自重、动力电池装载电量、综合作战效能以及费效比层面看,前横置柴电系统、中置动力电池系统、后置电传动系统,满足了车辆遂行战术打击时的车辆姿态并通过降低重量,换取更优的百公里综合油/电耗同时,优化批次采购成本。
重要的是,作为无人驾驶车辆行驶、无人操控作战模块的VU-T10以型号牵引模式为设计策略,本身就没有设定人员空间,动力总成、电传动系统、动力电池以及族战模块的布设本平衡性能以及战损快速更换为主。
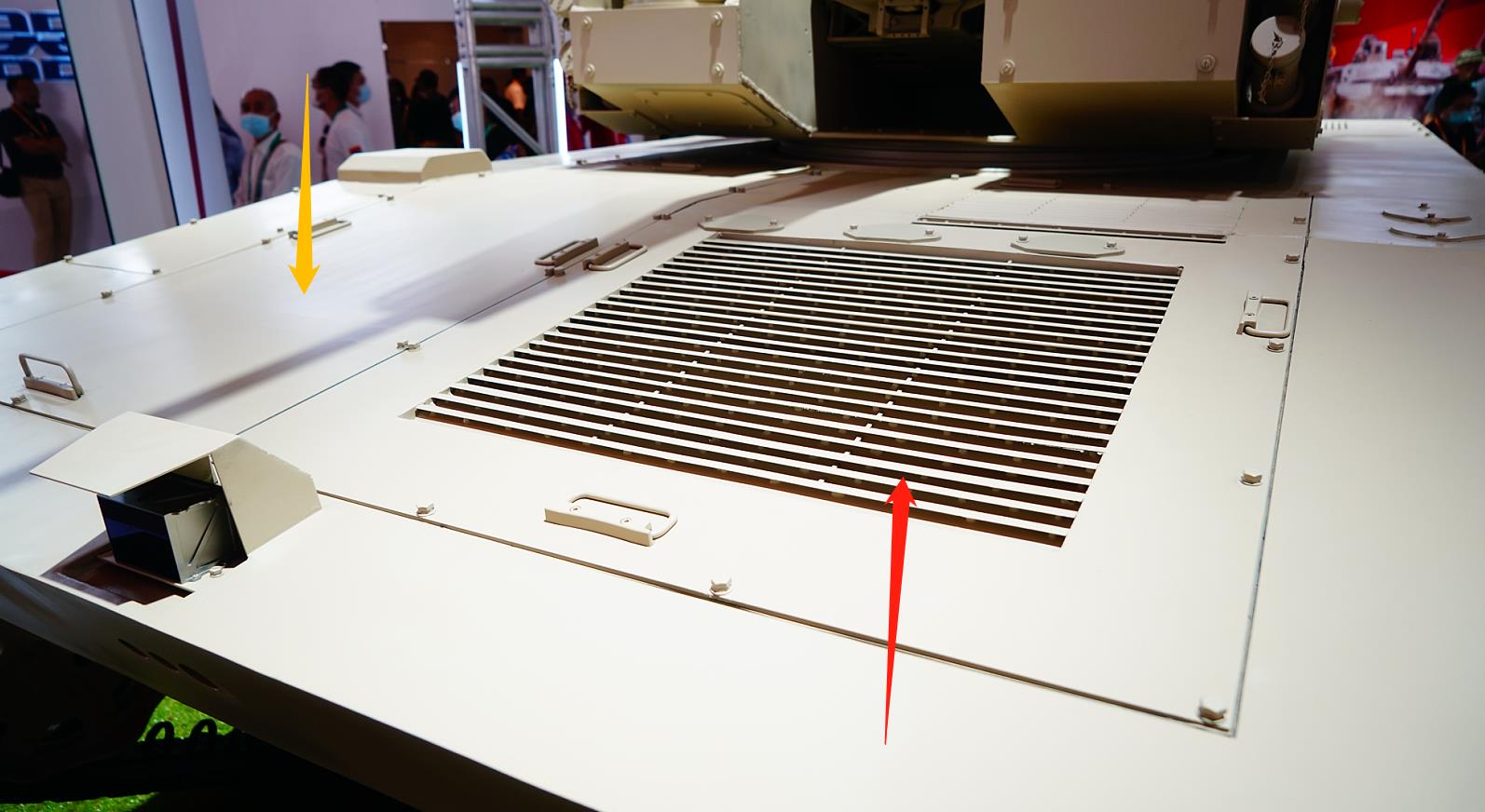
上图为VU-T10履带式无人装甲车首上装甲以及2组检修舱盖细节特写。
红色箭头:伺服散热组件,提升散热效率的百叶窗
黄色箭头:疑似用于检修至关重要的扁线绕组ISG发电机的检修舱盖(全装甲防护)
在有限的横向空间内,设定合适的柴油发动机以及串联的发电机,可以有效提升全系统综合效率(诸如并联模式高机动、串联模式发驱动效率和发电效率的均衡性)。
换句话说,柴油机的体积、排量和输出功率与发电机的体积和发电功率要相匹配。 合适的匹配结果是,柴油发动机输出功率和发电机发电功率尽可能做到相差无几。
以整车自重接近12吨VU-T10履带式无人装甲车为例,族战模块的电压平台、环境感知模块的电压平台、动力电池电压平台以及其他附属功率的电压平台,要听过DCDC进行转换。而全车的电量消耗,都要被柴油机和发电机组成的增程混动系统满足。
以2021年中国市场在售的主流EREV\EV\PHEV车型技术状态看,350-400伏电压平台占比 大;可是在全油门负载加速、动力电池系统大倍率充放电且电压 高点被限定时,就只能增加电流了。然而更大的电流需要更粗的动力线缆伺服;在大倍率充放电时产生的热量更大、存在着一定安全隐患。
VU-T10履带式无人装甲车采用远高于400伏的电压平台,动力电池系统热管理控制系统带有基于冷却液的高温散热功能、2组驱动电机、1组发电机和柴油发电机全部液冷主动散热。而全车高机动效率和作战效率均衡的核心,应用了扁线绕组ISG发电机,有效降低横向长度同时,提升转矩密度。
需要注意的是(10),VU-T10履带式无人装甲车采用的线控底盘技术相对轮式车辆较为简单,也更利于与环境感知模块合作达成实战环境下的真-无人驾驶和无人作战的战术效能。
备注:基于履带行走机构的线控底盘由2台电机驱动,完成直线行驶、单边转向和原地差速转向功能甚至可以满足部分制动需求。相对轮式行走机构的线控底盘,线性加速、线性制动和高精度线性转向,都要有不同的分系统达成。

2010-2020年代,日本防卫厅为日军提供的多种驱动模式、多种载荷的增程混动轮履装备进行实战环境的技术验证。以日本陆军装备的74式主战坦克为基础,换装增程混动系统和2组驱动电机加装锂硫电池。
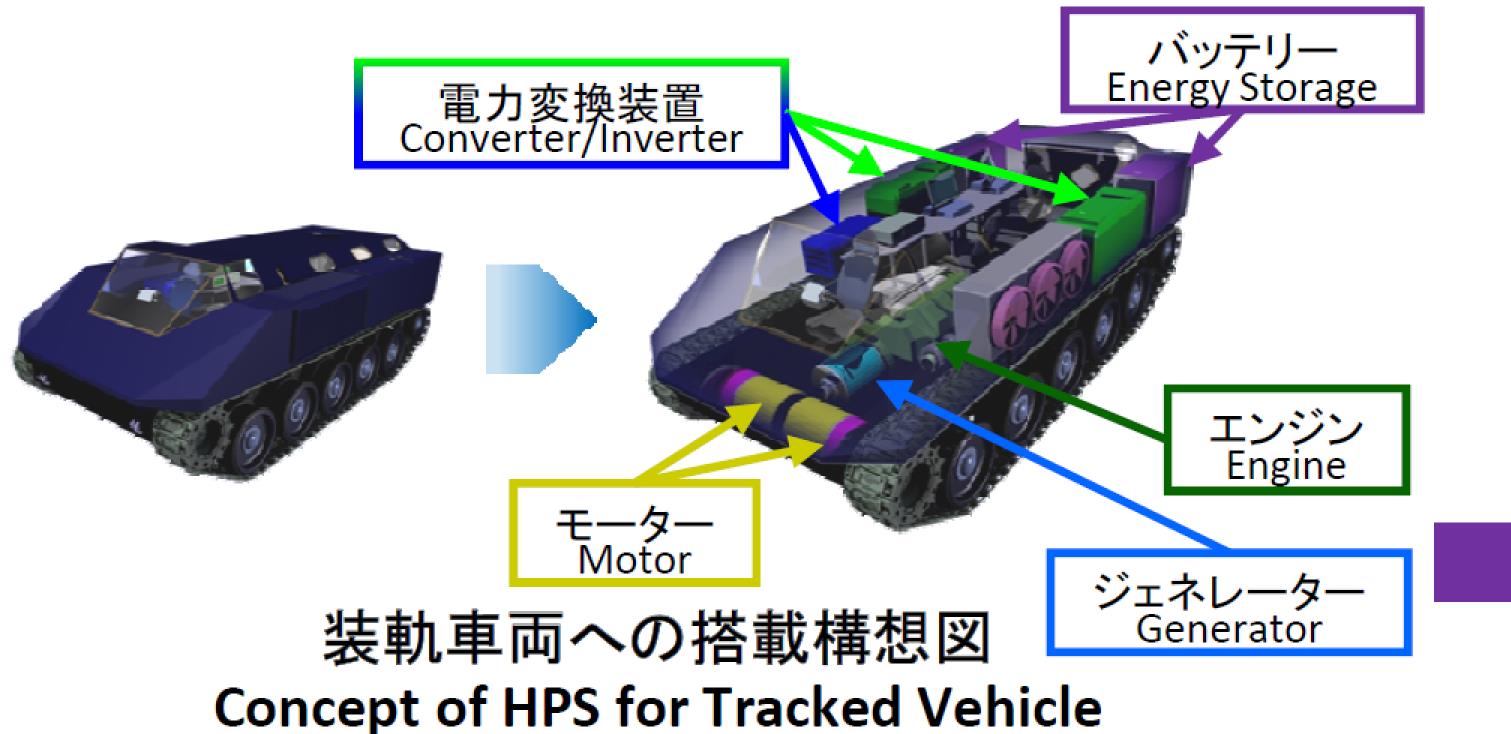
源自日本防卫厅相关信息比对,这款74式增程混动装甲车的柴油发动机和发电机纵置、两组驱动电机和减速器横置、锂硫电池系统后置、高压电控系统以及整车层面的热管理控制系统中置。
日军74式油电混动增程装甲车,主要用于验证电驱动系统和动力电池系统的可靠性。

首次于2018年举办的“跨越险阻-2018”地面装备挑战赛亮相、超级魔改63式增程混动无人驾驶装甲技术验证车,不仅要对电驱动系统、动力电池以及电控系统进行验证,还要对线控底盘技术+环境感知模块+作战侦搜模块的整合效率进行检验。
受这一时期中国新能源产业链发展的限制,63式增程混动无人驾驶装甲技术验证车的动力电池系统为主动风冷散热,大倍率放电功能相对被限定;介于63式增程混动无人驾驶装甲技术验证车,没有自动作战模块和复杂的火控系统,全车用电量相对较低,发电机的发电功率主要集中在2组驱动电机。
不过,超级魔改63式增程混动无人驾驶装甲技术验证车,较日军74式油电混动增程装甲车采用后横置增程混动系统、中后置动力电池总成的线控底盘、双向稳定热成像+夜视观瞄系统用来为以激光雷达为主、毫米波雷达和白光摄像头为辅环境感知模块提供额外支持的技术路线,与2021年对外公布的VU-T10履带式无人装甲车更贴合、更能满足实战应用需求。
我们的征途是星辰大海:
从来 新的技术都是优先应用于军事装备,然而今天的中国已经成为全球范围新能源全产业链 为成熟、新能源整车销量增速 大的国家。截止2021年10月,无论驱动/发电机、高压电控,还是不同类型的动力电池系统的全国国产化,都有政治可靠、技术过硬化的优秀供应商持续涌现出来。

在此次2021年珠海航展中,应用增程混动技术、不同行走机构、不同战术打击侧重点、不同载荷的新能源技术(无人驾驶/攻击技术)军用装备大批出现。显然,中国新能源全产业链的优势,已经具备了反向促进新能源技术军事应用实战化的硬实力。
VU-T10履带式无人装甲车的所具备的多种并联、串联和串并联模式多样化技术状态,完全满足机动、警戒和作战等灵活战术需求。而关键的技术点则是基于扁线绕组技术的ISG发电机所带来的充沛电量支持。
新能源情报分析网评测组出品










