


由郑州某机电研究所研发,基于增程式油电混合驱动架构(REEV)的ZDW01型履带式侦打突击无人作战系统,在2021年举办的珠海航展期间亮相。作为弹炮融合轻型高机动末端防御武器的侦打突击无人车”的履带式无人作战系统,主要承担高价值目标的警戒防空任务,用于拦截入侵的地面机动车辆、人员、低慢小飞行器等目标,满足局部反侦察、破袭的安全需要。系统采用单车集成设计、武器系统由抛射微型导弹、搜索雷达、光电跟踪照射设备、快速发射装置、车载平台及指挥控制设备等组成。有所火力分系统及控制分系统集成于单台车辆上,单车即为一完整的作战单元。
从技术优势比对,侦打突击无人作战系统基于“型号牵引”模式正向开发的车型平台,具备模块化和轻量化特点。增程式油电混合驱动架构具备全电驱动模式、混动驱动模式、怠速发电模式和行车发电模式,采用依双侧驱动电机力矩的的差速转向技术。
从战术优势比对,侦打突击无人作战系统是一款具备战场机动、侦查引导、火力打击的能力,是机械化、信息化、电子化与智能化高度融合的机动作战平台,将侦查、跟踪和打击战术一体化,将机枪、火箭弹和导弹多武器系统一体化。
本文将对侦打突击无人作战系统增程式油电混合驱动系统及一体化热管理控制技术优势,侦打突击无人作战系统堪称“武装到牙齿”的火力打击战术能力,综合研读与判定。
备注:文中提及的ZDW01型履带式侦打突击无人作战系统所有技术、配置和策略,以官方发布信息为准。后文简称侦打突击无人作战系统、增程式油电混合驱动架构简称REEV。
1、侦打突击无人作战系统的载具端REEV技术和一体化热管理控制策略优势:
这款采用1组发电机+发电机+双驱动电机+动力电池系统构成的REEV架构,并疑似采用域控制策略+线控底盘技术方案的无人作战系统,将载具端环境感知系统与侦查打击系统程度合并在一个上装模块。

通过笔者目测,这台侦打突击无人作战系统长宽高或被设定在3000\1000\2000mm级别、战斗全重或在2-3吨之间。载具端的前部(蓝色)区域,或用于承载REEV系统(含电控)和双驱动电机(含电控)。载具端的中部(红色)区域,或用于承载动力电池系统(含电控)。
黄色区域:发动机与ISG启发电一体机横置,可以提升系统的空间利用率
绿色区域:双驱动电机采用立绕式扁线绕组技术,可以提升转矩密度同时,严格限定占据的横向空间并降低散热需求
白色箭头:载具端的驱动电机与行走机构的主动轮之间增设“2AT”,或提升 高行走速度、或延长全电驱动作战半径
需要注意的是(1),侦打突击无人作战系统的REEV系统,首先要满足载具端的用电需求,然后还要满足火力与侦查上装模块的用电需求同时,还要注意全域电压平台与一体化热管理控制技术/策略的设定!
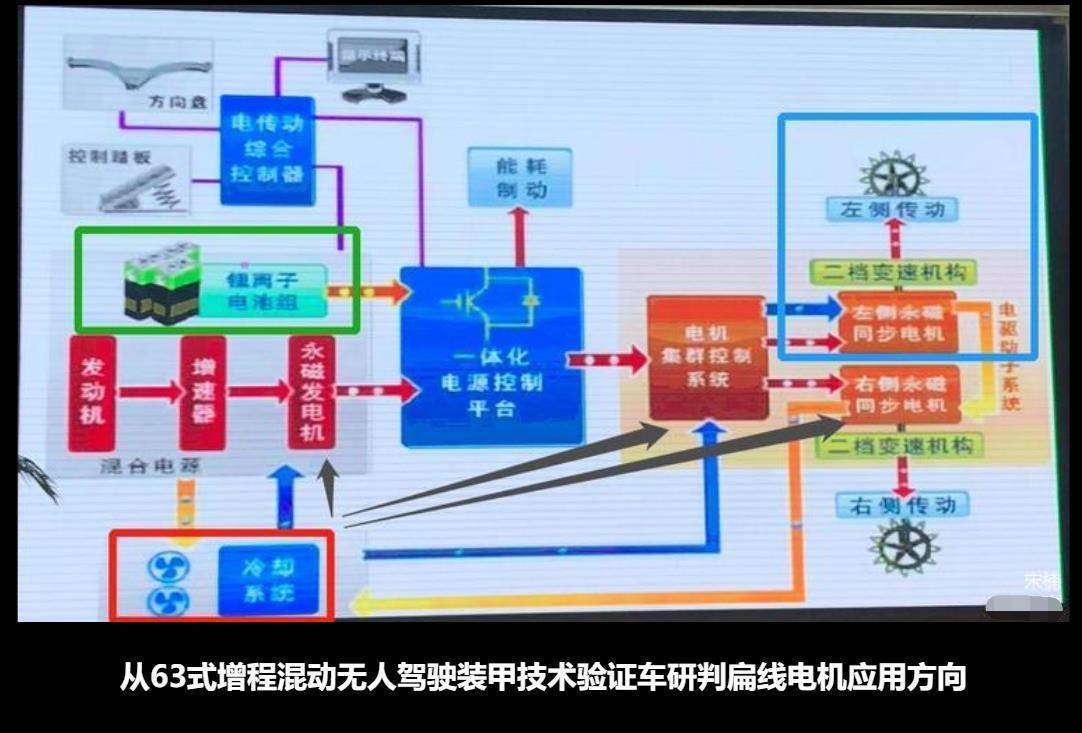
上图为基于63式装甲车换装REEV系统的无人驾驶技术验证车的“流程”简图。在中电压平台基础上,增加了双“2AT”以提升机动性的同时,稳定电流和动力电池内部电芯温度的瞬时激增带来的安全隐患。
需要注意的是(2),当下战斗全重超10吨的REEV轮履装备,都会选择500-800伏全域电压平台方案(发电机、驱动电机、动力电池以及其他高压用电系统都采用相同的电压),可以降低电流同时保证电器内部连接器件不被烧融、抑制动力电池内部温度、对热管理控制技术/策略的要求有所放宽。
对于新能源民用车辆,引入800伏全域电压平台方案,是保证大功率直流充电效率的提升根本,更是整车防止热失控的前提。
对于新能源军用装备,引入800伏全域电压平台方案,是保证大倍率放电高机动性的提升根本,更是整车抑制热辐射的前提。
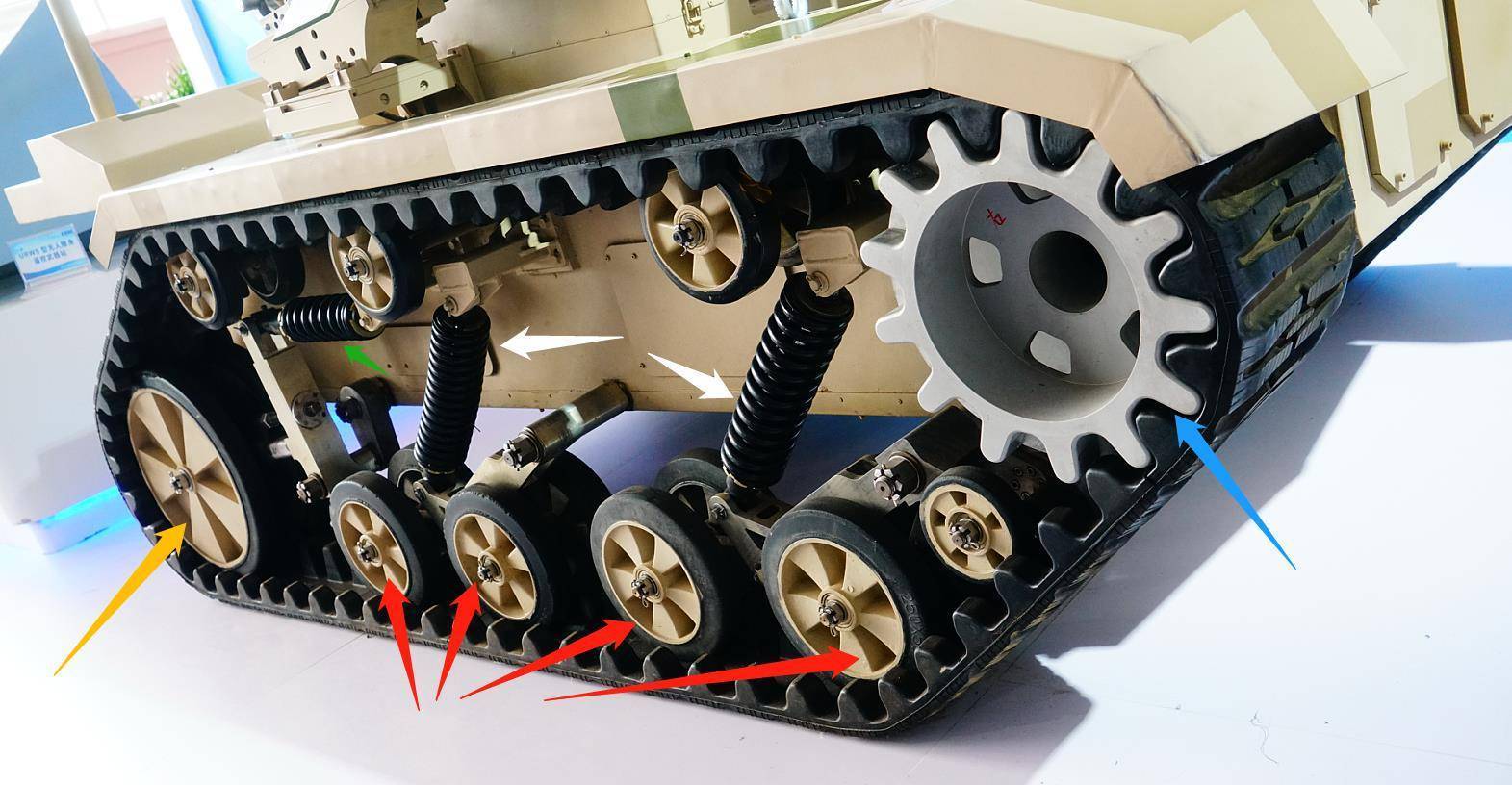
上图为侦打突击无人作战系统载具端的行走机构技术状态特写-1。
蓝色箭头:疑似轻量化的主动轮
黄色箭头:双轮缘诱导轮(中尺寸直径)
红色箭头:双轮缘负重轮(小尺寸直径)
白色箭头:传统螺旋弹簧作为负重轮减震器
单从诱导轮和负重轮的尺寸以及减震器的结构比对,侦打突击无人作战系统并不是以高机动设定为主。根据全电驱动模式下战斗半径、使用背景综合因素考量,引入REEV系统的主要出发点,是满足用电量大幅增加的火力侦察上装模块需求为优先出发点,然后才是用电动化替代了复杂的机电传动系统而获得的隐蔽突击能力与高可靠性。
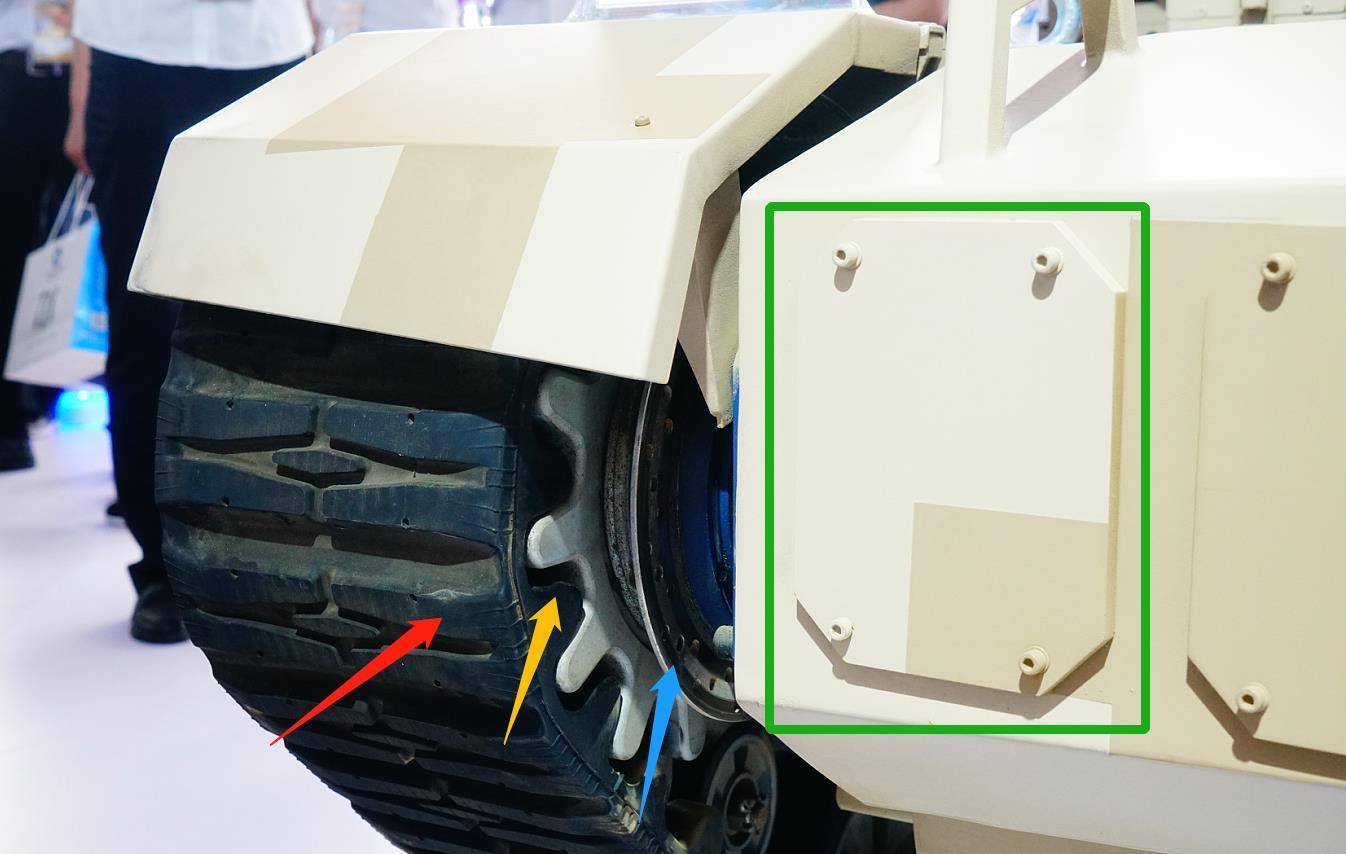
上图为侦打突击无人作战系统载具端的行走机构技术状态特写-2。
红色箭头:全橡胶带“凸缘”的一体化履带
黄色箭头:橡胶履带“凸缘”与主动轮齿“啮合”的十分精准
蓝色箭头:位于主动轮与驱动电机(减速器)之间的制动盘
绿色区域:通过螺栓固定且带有装甲防护的检修口
侦打突击无人作战系统的载具,适配的全橡胶履带必须要满足与采用轻量化材质的主动轮齿“啮合”的精密,否则容易高速行驶以后差速转向时脱落。而这种满足了全寿命周期内刚性与强度和耐磨损性的橡胶履带,早已达成了全国产化的设定。
对于可以归类到轻型的侦打突击无人作战系统,采用了双侧电机正转与反转时产生的速度差,以达成原地“360度”转向的功能设定。当然,也可以单侧电机停转、单侧电机驱动,进行左\右侧转向的功能设定。
鉴于差速转向时,双侧电机所承受的电流或在瞬时增加;全电驱动模式全负载加速;在增程混动行车发电模式同时上装模块遂行多种战术打击,全车的所有高压\低压用电系统都要进行精准的散热伺服。
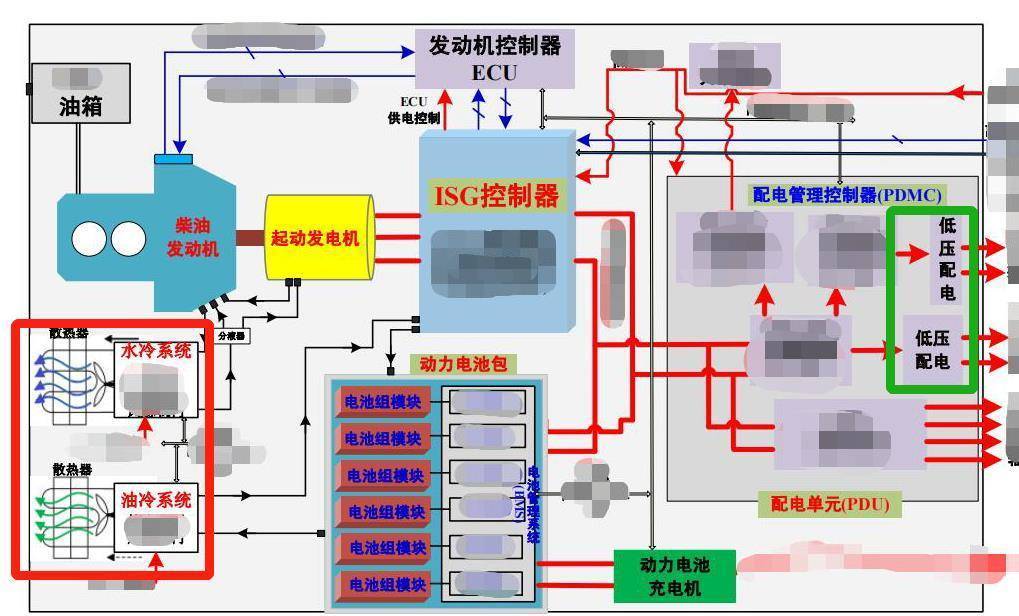
发动机-ISG发电机输出电量后,一部分电量至驱动电机、一部分电量至上装模块、一部分电量至动力电池。在整个流程中,关键的技术点不仅是800伏全域电压平台方案,还要满足载具端、上桩端的高低压电的使用。
红色区域:润滑油循环系统和冷却液循环系统是单独设定
绿色区域:高压用电系统和低压用电系统的用电需求,都要由需要冷却液伺服的PDU控制模块进行分配
对于这款ZDW01型履带式侦打突击无人作战系统,越发复杂且分工明确的高压用电系统和低压用电系统的冷却\保温技术及控制策略,明显超过了相对简单的动力电池热管理控制技术/策略!
需要注意的是(3),通过REEV技术架构,去掉了产生噪音、效率低下的机械\电控传动系统,已达到提升通过性和可靠性的技术设定。
通过标定全域800伏电压平台,以强化电驱动效率并降低动力电池热失控几率。
通过引入一体化热管理控制技术/策略,将整车不同散热\预热需求的分系统纳入到一个大循环体系,达成“冷量”和“热量”转化过程中的高效率。
2、将载具端的无人驾驶系统和火力上装无人作战系统高度结合的战术打击优势:
侦打突击无人作战系统的电子侦查部分与火力打击部分,集成在一个上装模块中。单纯从外观判定,侦打突击无人作战系统的上装端的电子侦查系统与载具端的无人驾驶系统进行了整合。由此构成的无人驾驶+无人作战双重解决方案,不仅节省了一些硬件成本,还在控制策略上进行了相对的简化。
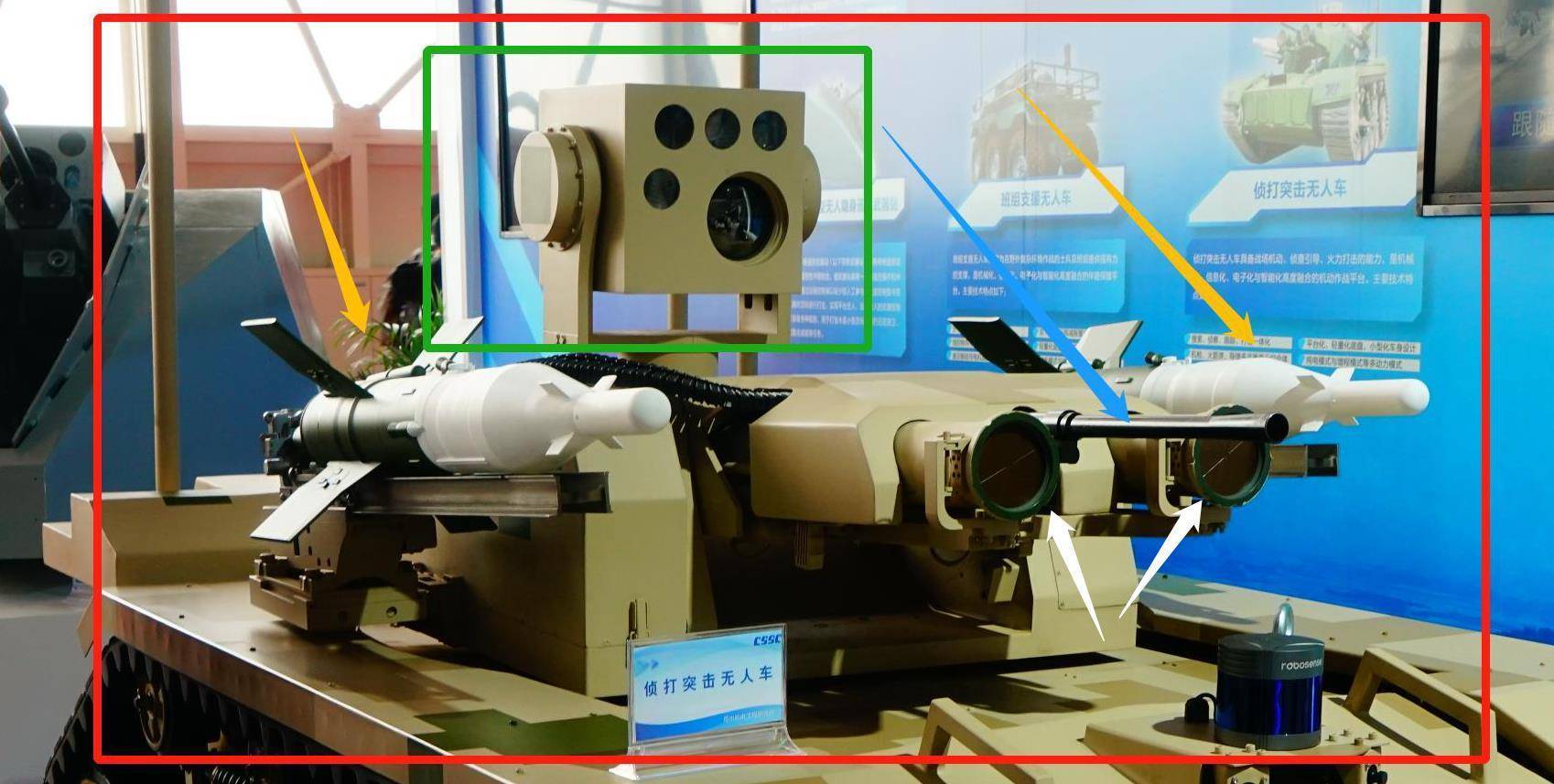
完全可以用“武装到牙齿”来形容侦打突击无人作战系统的上装,集成了包括1组链式供弹机枪、2组火箭筒火力打击和2组红旗73(疑似)反坦克导弹。
红色区域:上装模块
蓝色箭头:链式供弹的机枪(双稳定)
白色箭头:2组可快速更换的火箭筒(反装甲+反工事)
黄色箭头:2组红箭-73式反坦克导弹
绿色区域:兼顾无人驾驶系统、主打无人作战需求的多种环境感知与侦查扫描光电总成
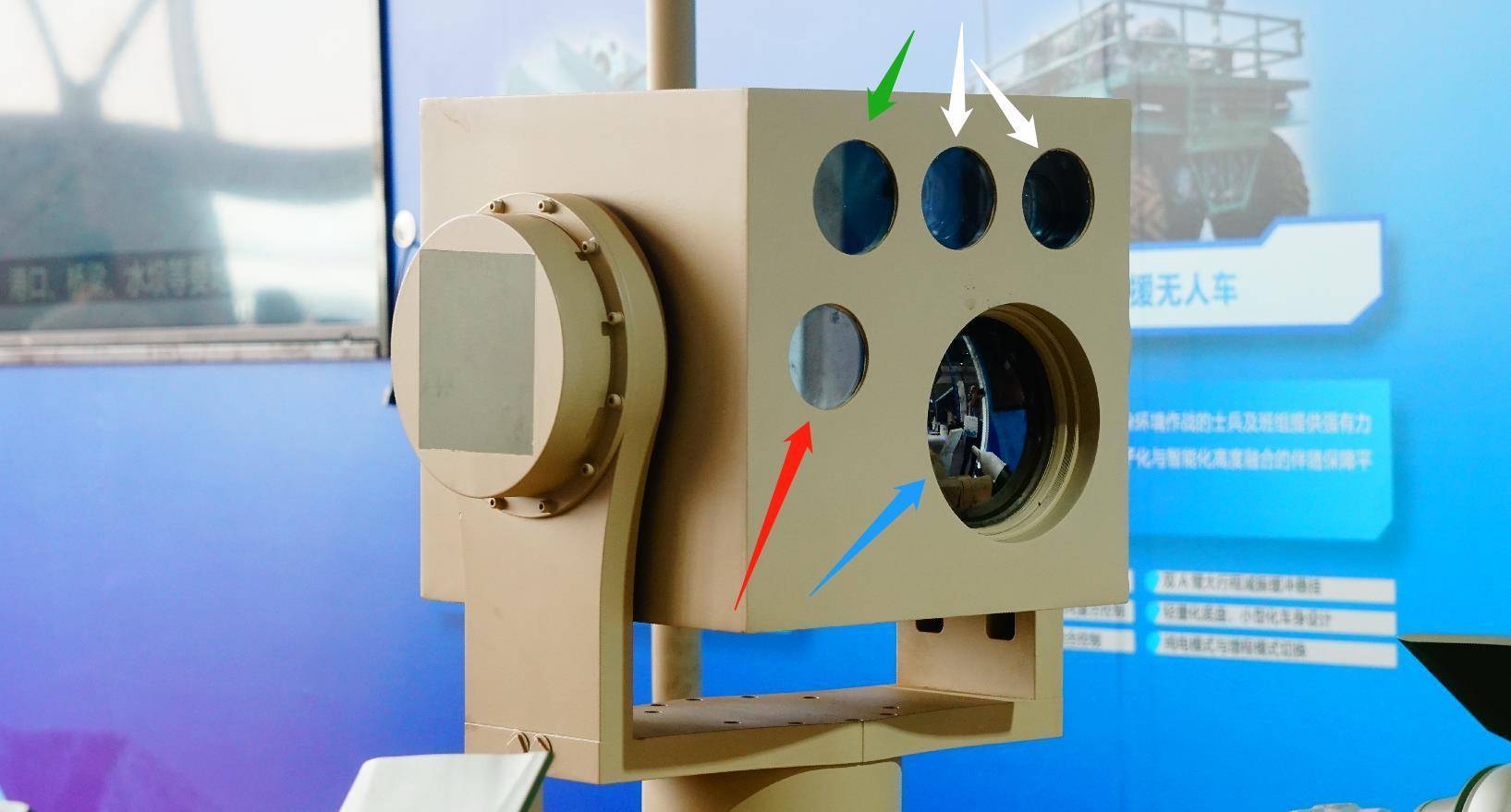
上图为无人作战系统的侦查扫描光电总成各个感知器件特写。
红色\蓝色\绿色\白色箭头所指的各侦查单元的名称实在不能确认,不过可以肯定的是集成了热成像与夜视仪,以便在多种复杂环境下的目视跟踪与目标识别。
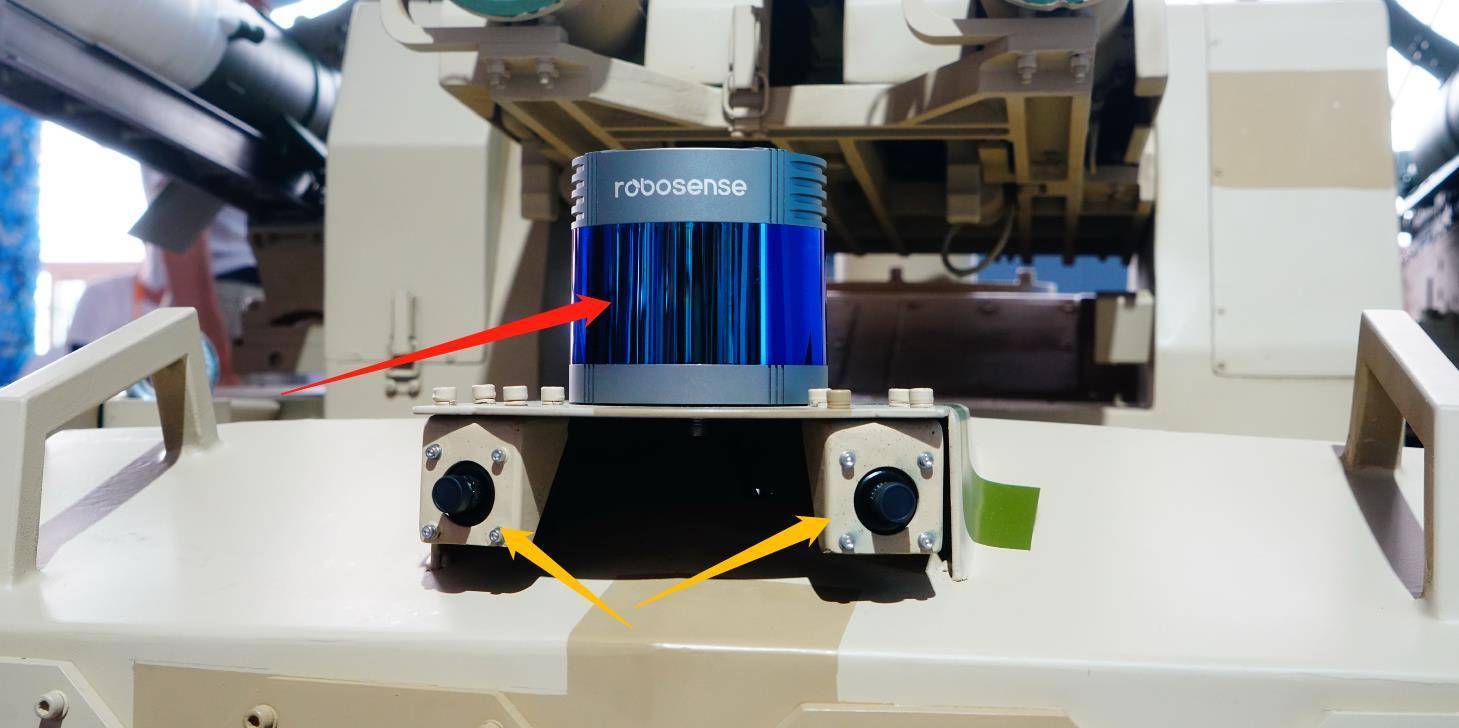
上图为无人作战系统的载具端设定的激光雷达(红色箭头)和2组以30度角设定的白光摄像器材(黄色箭头)特写。
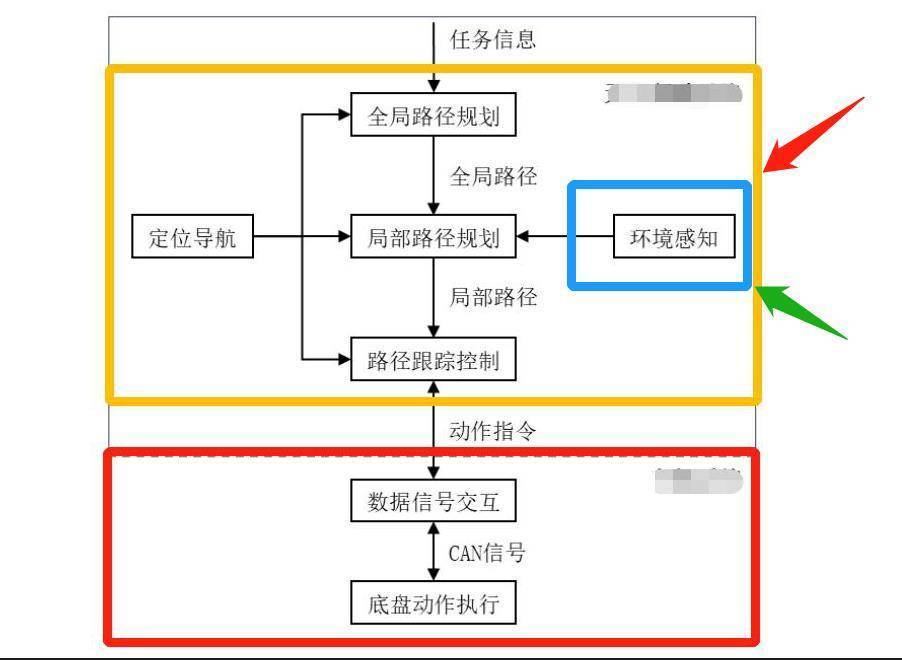
上图为某型全电驱动无人驾驶载具的流程简图。
黄色区域为整车(预)控制系统,接受来自环境感知系统输入的信号、通过计算向线控底盘下达指令。
蓝色区域为环境感知系统,即通过包括激光雷达、毫米波雷达、白光\夜视\热成像器材捕捉到周边信号。
红色区域为线控底盘系统,执行来自整车(域)控制系统输入的行动指令并上传实时姿态和轨迹信息。
需要注意的是(4),将这套控制流程和解决方案“套入”到ZDW01型履带式侦打突击无人作战系统中,火力上装模块的多种侦查器材作为主要1号输入端,线控底盘载具端的激光雷达和摄像器材作为辅助的2号输入端,既以单独、也可协同送至环境感知系统。
这样的解决策略和设计思路,可以认为与ZDW01型履带式侦打突击无人作战系统预设的局部反侦察、打击低慢小、保卫高附加值武器的战术环境相吻合。与此同时,侦打突击无人作战系统在强调了轻量化和高效率,相应的对无人驾驶系统的设定进行了“让步”。
阅读延展:
就在2022年10月早些时候,美军发布了包括M1主战坦克、M2/3履带式步兵战车、斯崔克轮式装甲车使用增程式油电混合驱动架构 新改型版本,以及众多全电驱动无人驾驶载具和无人作战系统。

在美军推出的一款基于全电驱动的无人作战装甲车上,载具端的环境感知系统采用2组激光雷达(红色区域),前后各1组毫米波雷达(黄色区域)以及完整的多通道观瞄系统(绿色区域);火力上装模块虽然略显单薄,但也配置了机枪与双通道观瞄系统(蓝色区域)。

然而,对于美军即将装备的使用REEV\EV驱动架构的中重型有人操控\无人作战装备,为了能够达到预设的、甚至超期的综合性能与至关重要的可靠性,就必须要对载具端动力部分、环境感知端电子部分、火力上装端电液部分进的散热\预热\冷却需求进行精准伺服。
即,整车层面不同温度需求的分系统的热管理控制技术/策略,要与全车综合性能相匹配甚至要具备更宽泛的冗余量。可预见的是,在2023年以后出现的采用REEV\EV驱动架构的陆海空天有人操控\无人作战装备中,整车层面一体化热管理控制技术\策略将成为综合性能突破的关键点。
我们的征程是星辰大海!
在此前新能源情报分析网发布的一系列稿件中,针对国内新能源产业链中的具备自行研发和量产大功率扁线电机、锂硫电池系统、以及全域高电压平台的主机厂和供应商的状态进行了逐级研读和判定。
然而在整车层面的一体化热管理控制技术\策略的发展,部分主机厂或调用供应商的成品进行二次升级;部分主机厂干脆在全新车型平台展开全部分系统的协同研发与合装。
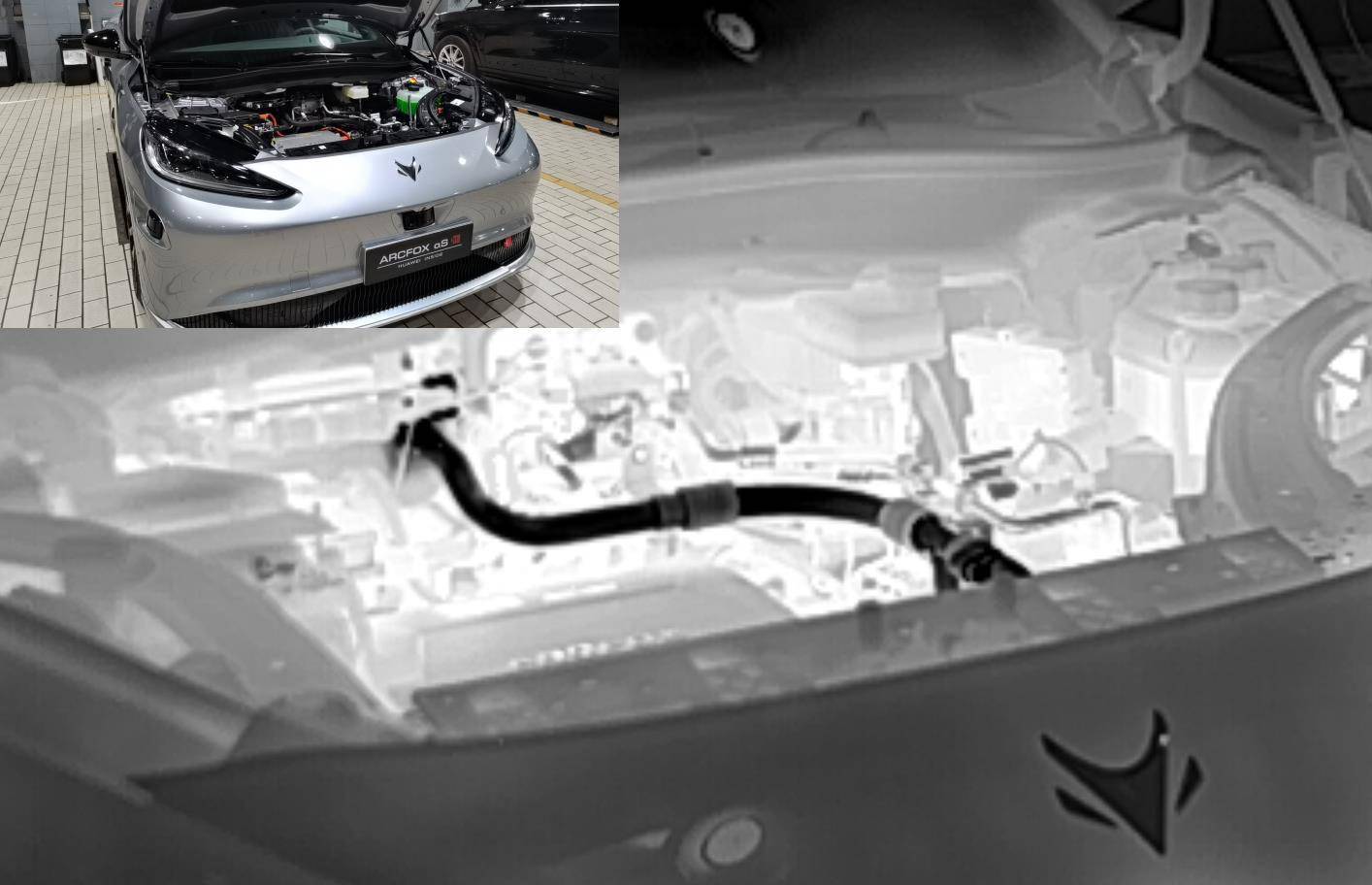
上图为热成像器材拍摄,蓝谷极狐阿尔法S HI版的动力舱内各分系统冷量和热量转化过程特写。作为蓝谷极狐与北京越野车同为北京汽车集团下属子公司,阿尔法S HI版采用调用华为800伏电压平台+热泵空调+一体化热管理的控制技术\策略,然后根据整车开发需求进行二次升级。
需要注意的是(5),北京越野即将推出的采用REEV驱动架构+电四驱系统的BJ60越野车,或将在线控底盘基础上引入更精准的整车层面一体化热管理控制技术\策略。

上图为热成像器材拍摄,比亚迪海豹动力舱内各分系统冷量和热量转化过程特写。作为全球的一家具备电机、电控、电池及整车研发、测试和量产的中国车厂的比亚迪,在海豹车族上采用线控底盘+全域550伏电压平台方案。基于AH系列热泵空调压缩机、整车层面一体化热管理控制技术\策略以及全车其他核心技术,全部自行研发和量产。
需要注意的是(6),目前比亚迪特别成立了多家弗迪系列独立核算与商业运营的子公司,其业务涵盖了多种插混专用发动机、多种扁线电机、多种动力电池、电子晶片等分系统研发、制造和对外销售。
基本上可以确认的是,包括本文介绍的ZDW01型履带式侦打突击无人作战系统,和其他类基于轻中重型REEV\EV驱动架构有人操控\无人作战系统,来自中国本土的新能源\无人驾驶产业链已经十分成熟且完全可以承担大规模快速量产的能力。
新能源情报分析网评测组出品











